Inverted Pendulum with iOS App Controller
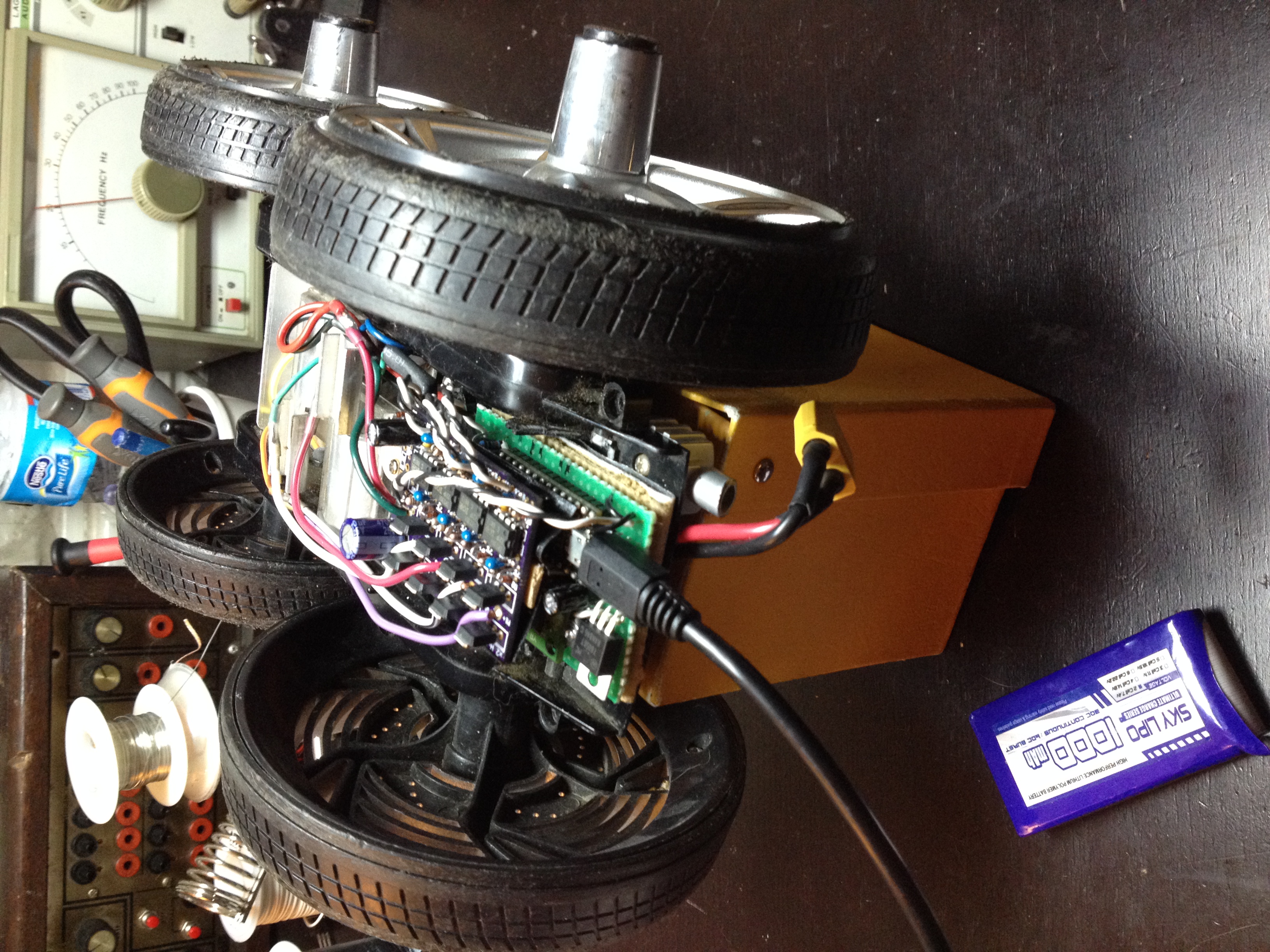
I started the inverted pendulum project while in school at the University of Florida, while taking the Intelligent Machine Design Lab, EEL 5666, which is basically a crash course in robotics.
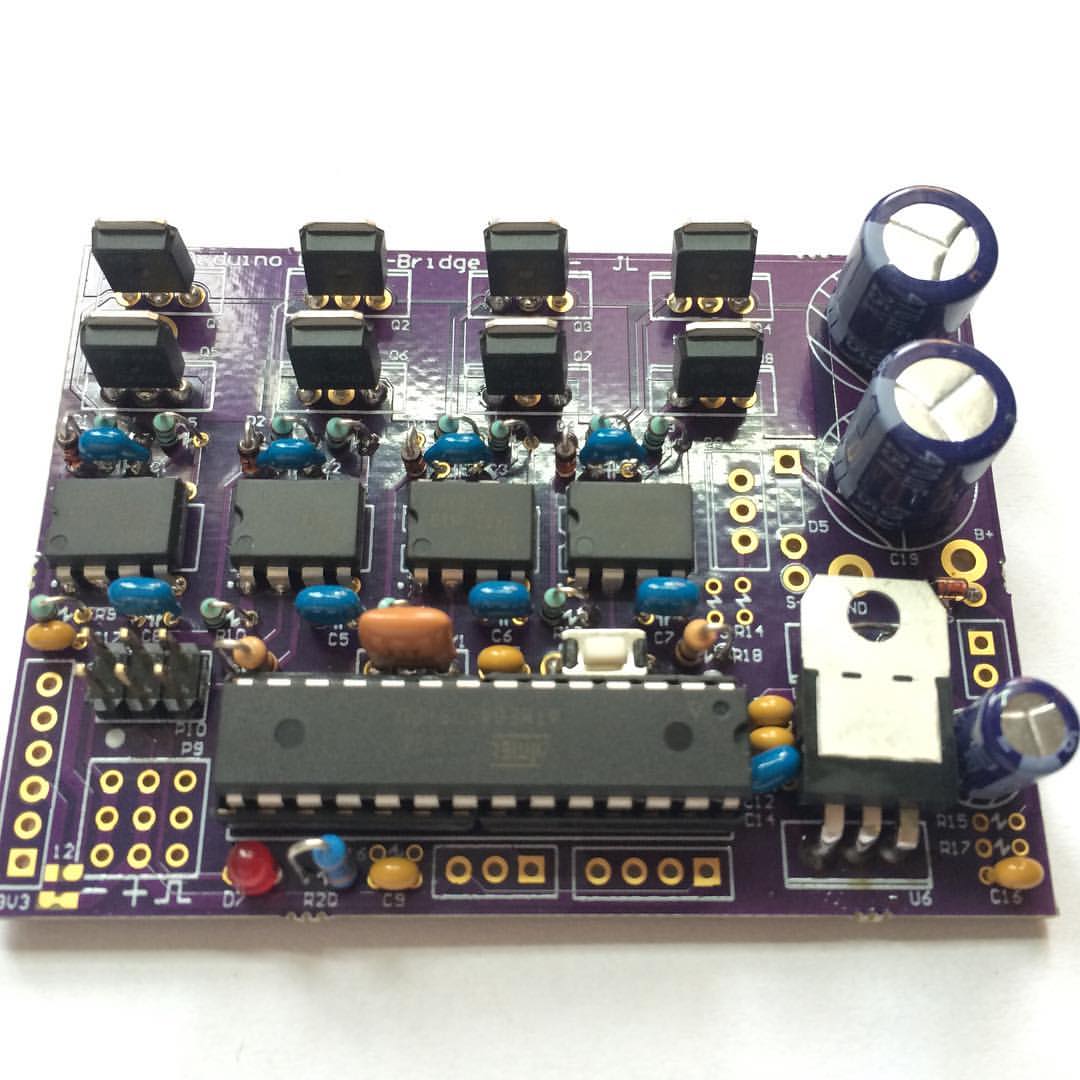
I kept extending the project as a hobby for the next 8 years, and this toy RC car has been modified to transition between driving on 4-wheels or upright on two! Using a Freescale microcontroller, 6-DOF IMU, dual h-bridge motor control, bluetooth radio and custom iOS app, this car can drive on it's head. A custom PCB was designed for the motor control and a custom iOS app was written to drive the robot over bluetooth as well as tune the motion controller.
Later, while working at Black & Decker, I used this platform to build a crude example of a Segway, using recycled drills directly coupled to the wheels.